← Projects
Embedded Systems
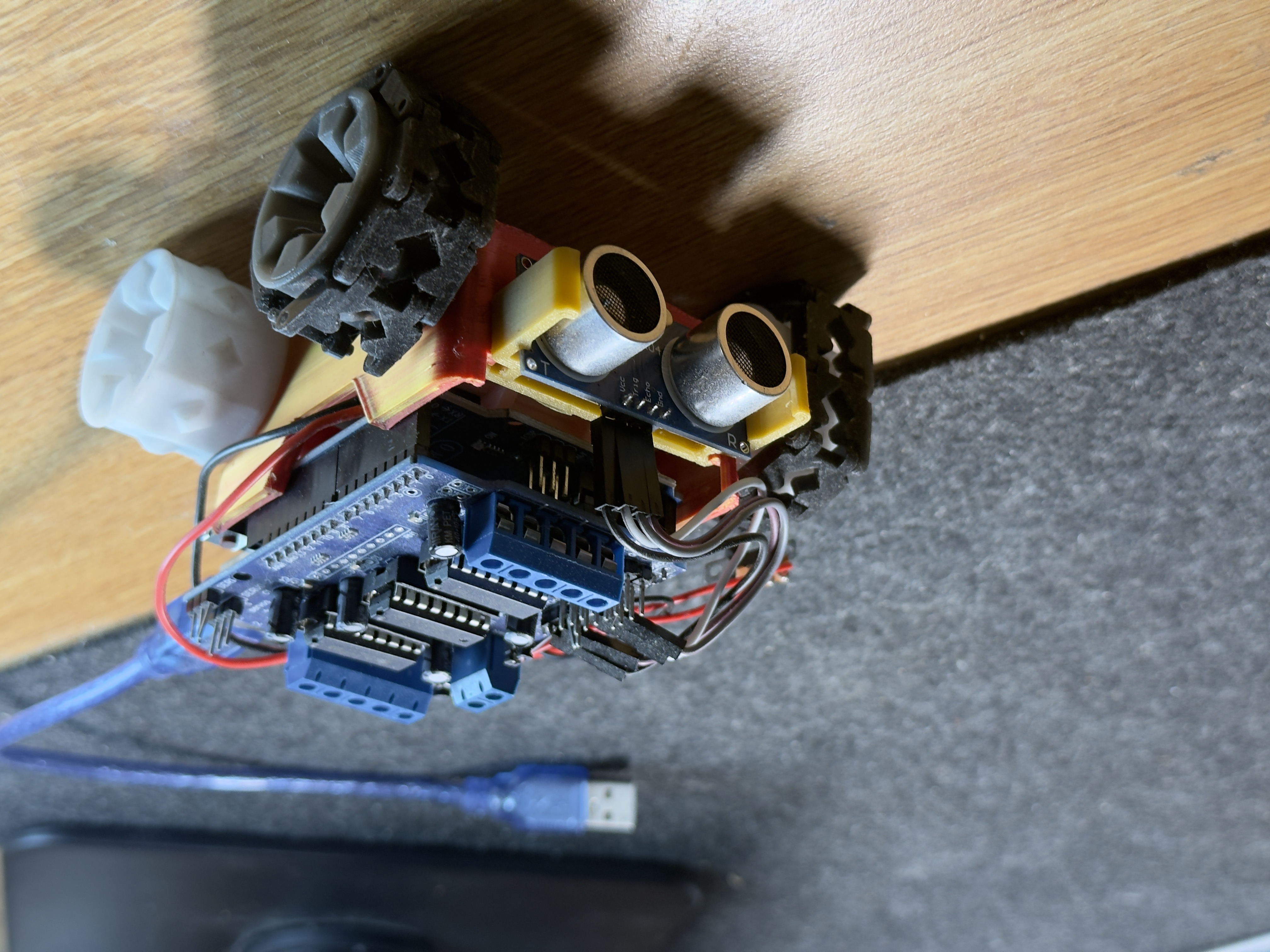
Autonomous Obstacle Avoidance Vehicle
Ultrasonic Sensing · Arduino IDE · Embedded Systems
Overview
| Microcontroller | Arduino Uno |
| Distance Sensor | HC-SR04 Ultrasonic |
| Language | C++ |
| Detection Range | 2 – 400 cm |
| Behavior | Real-time avoidance |
| Architecture | Non-blocking (millis) |
400 cm
Maximum sensor range
2 cm
Minimum detection range
3 states
State machine states
Objective
Built an autonomous obstacle-avoidance vehicle that uses ultrasonic sensing to detect and steer around obstacles, clearing a multi-obstacle course.
Approach
Engineered the platform around an Arduino Uno running a C++ control loop, pairing an HC-SR04 ultrasonic sensor with a 2-motor differential drive on a PLA chassis.
Build
Implemented the obstacle-avoidance firmware and tuned open-loop turn timing and detection thresholds empirically.
Result