Mechatronics & Controls Lab
Omnidirectional UAV Research
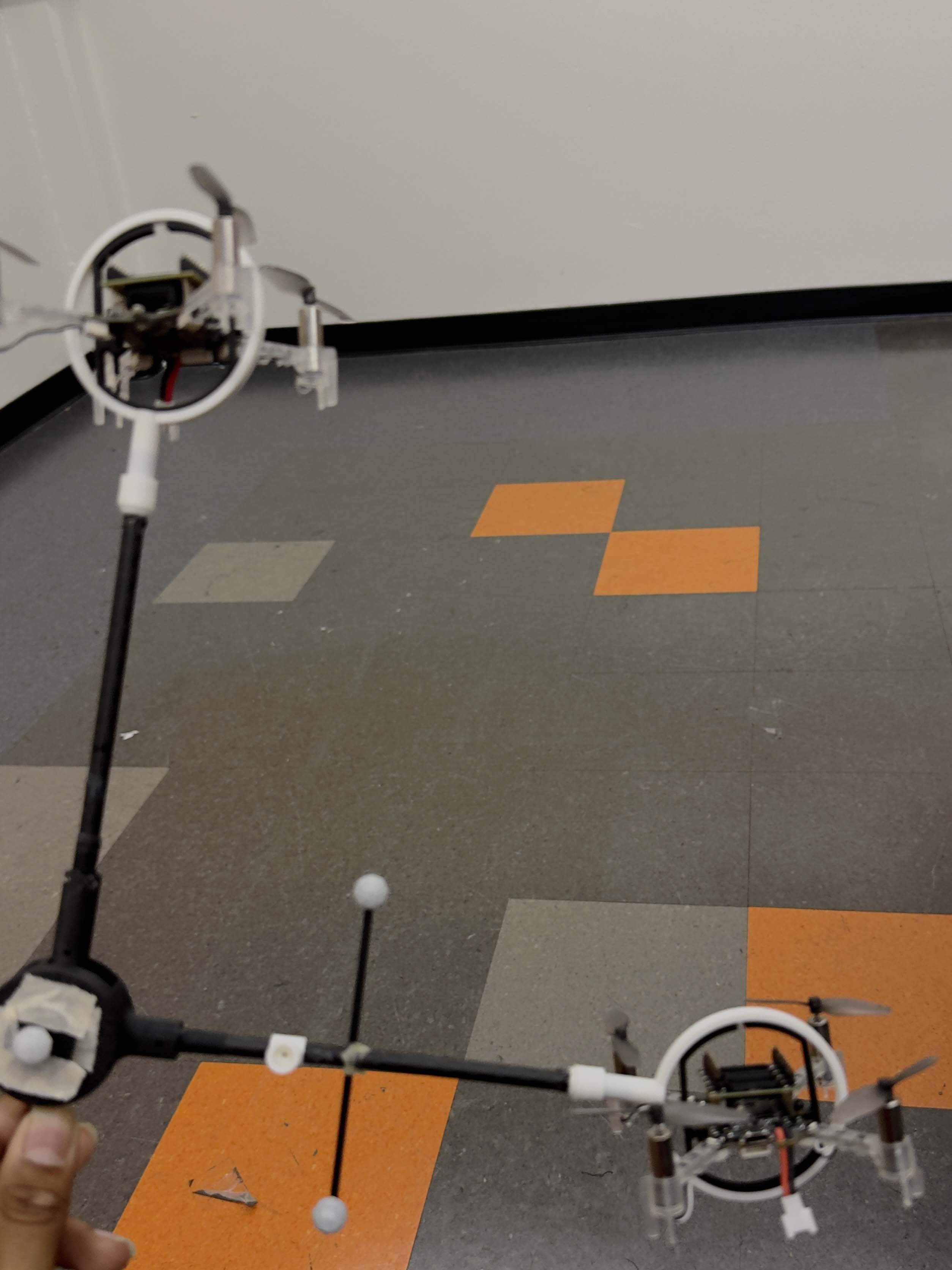
Overactuated 6-DOF UAV with 4 passive gimbals
Overview
| Platform | Overactuated UAV |
| DoF | 6 |
| Mass | 155 g |
| Quadcopters | 4 |
| Quadcopter Model | Crazyflie 2.1 |
| Gimbals | 4 |
| Motors | 16 |
| Motor Size | 0.28 × 0.6 in |
| Total Thrust | 0.63 lbf |
| Frame | Carbon Fiber |
| Gimbal Material | PLA (FDM Print) |

Overactuated flight control
Across four gimbaled quadcopters
Total platform mass
Problem
Traditional multirotors are underactuated, so lateral movement requires tilting the entire frame. However, this prevents vertical hovering or surface inspection. Making a drone fully overactuated solves this but creates a new issue when the gimbaled rotor approaches vertical alignment, the mechanism loses an effective degree of freedom. Designing a joint that holds the gimbal constrained during normal operation and smoothly unlocks a vertical axis is the specific problem I am working on.
Concept
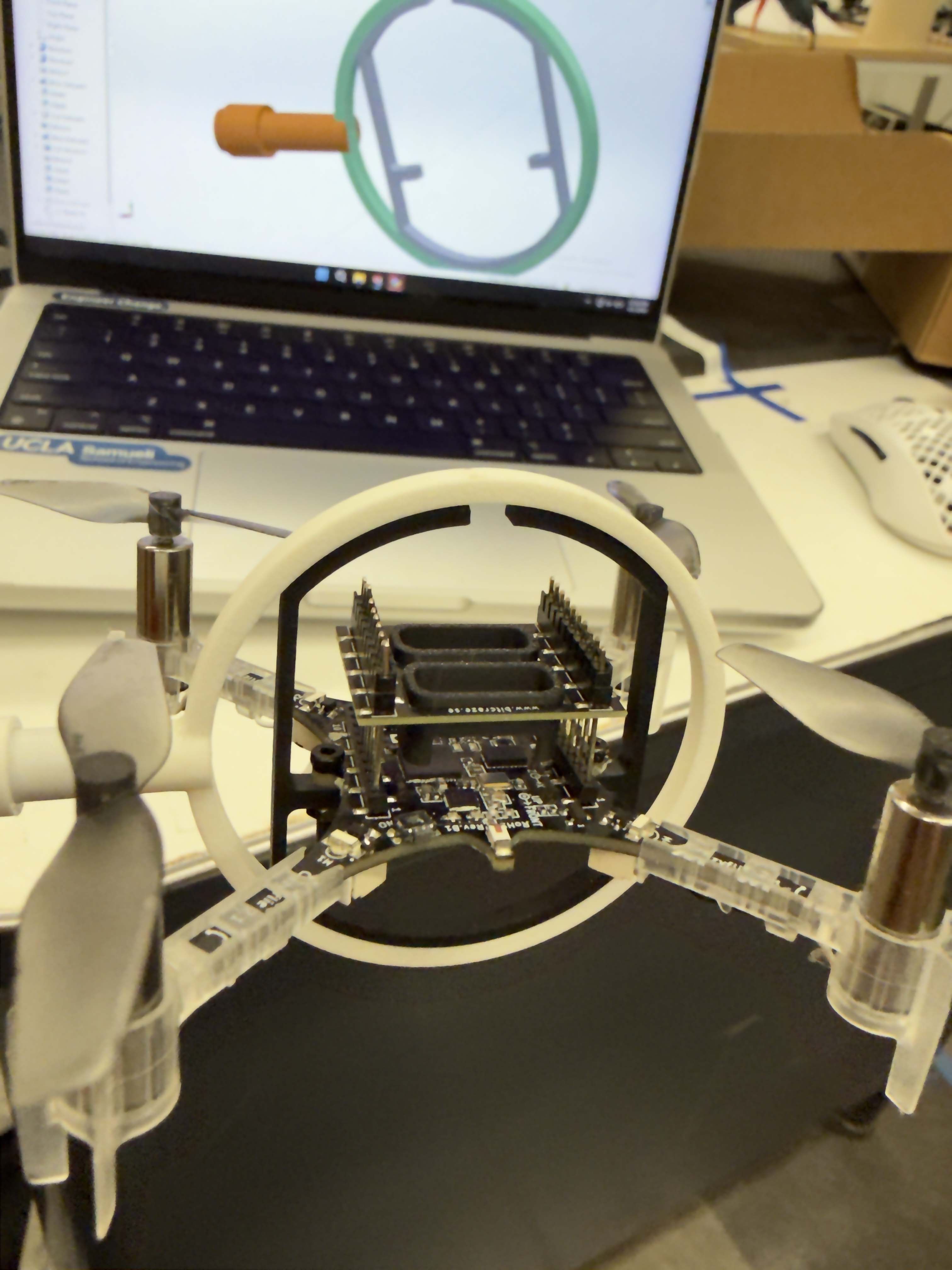
The platform suspends four Crazyflie 2.1 quadcopters in 3D-printed (PLA) 2-DOF gimbals mounted on a carbon-fiber frame. This gives each actuator the ability to independently steer its thrust vector.
Approach
Using SolidWorks, I iterate on joint geometry prototypes. Each iteration is 3D-printed in PLA and evaluated for transition behavior at the vertical angular boundary, structural integrity, and compatibility with the Crazyflie mounting.
Vision
This research could lead to future drones that can fly in 6+ DOF, making them useful for inspecting cliffs, caves, spacecraft, and other hard-to-reach places. On Mars, a scaled version could explore crater walls, lava tubes, and steep terrain that rovers can’t reach. Its gimbaled thrust system could allow a Mars copter to hover while pointing cameras/science instruments in different directions. Titan may be an even stronger vision because its dense atmosphere and low gravity make flight easier, allowing 6-DOF drones to explore icy terrain or organic deposits.